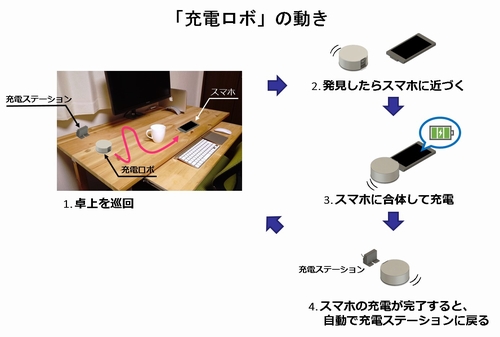
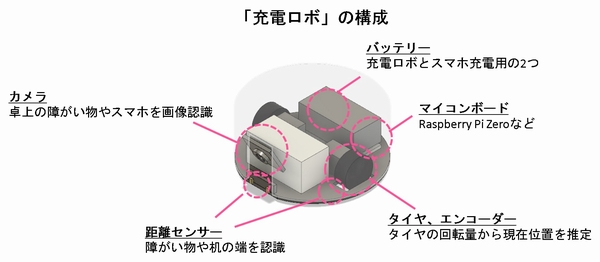
「充電ロボ」とは、カメラと距離測定センサー、およびRaspberry Pi Zeroなどのマイコンボードを搭載した、スマホを自動探索・充電する自律走行ロボットです。仕組みは、充電ロボに付いているカメラから卓上の状況を画像認識し、障がい物や机からの落下を避けながら、スマホを探索します。スマホを見つけると、USBポートを認識して自動でスマホに接続、充電を行います。充電が完了すると、スマホから離れ、充電ロボ自身を充電するために、自動で卓上の充電ステーションに戻ります。画像処理やシステム制御を工夫することにより、安価な部品のみで高度な動作を実現しました。
Handle is a research robot that stands 6.5 ft tall, travels at 9 mph and jumps 4 feet vertically. It uses electric power to operate both electric and hydraulic actuators, with a range of about 15 miles on one battery charge. Handle uses many of the same dynamics, balance and mobile manipulation principles found in the quadruped and biped robots we build, but with only about 10 actuated joints, it is significantly less complex. Wheels are efficient on flat surfaces while legs can go almost anywhere: by combining wheels and legs Handle can have the best of both worlds.
 날씨
날씨